Équipe CMD : Commande (responsable : Brahim CHERKI)
Les thèmes de recherche de cette équipe sont articulés autour de la modélisation, lobservation et la commande des systèmes physiques :
Modélisation, commande et observation des bioprocédés./li>
Commande robuste des systèmes physiques incertains.
Synthèse d'observateurs pour les systèmes non linéaires et hybrides.
Commande des systèmes mécaniques sous actionnés.
Coopération :
Université de Montpellier 2 (http://www.umontpellier.fr?)
Université dOran (http://www.univ-usto.dz)
Université ou laboratoire de Metz
LBE-INRA de Narbonne (http://www4.montpellier.inra.fr/narbonne)
Mistea-Modemic de Montpellier (https://team.inria.fr/modemic/fr)
Université de Valencienne (http://www.univ-valenciennes.fr/)
1- Modélisation et commande des bioprocédés de traitements des eaux usées :
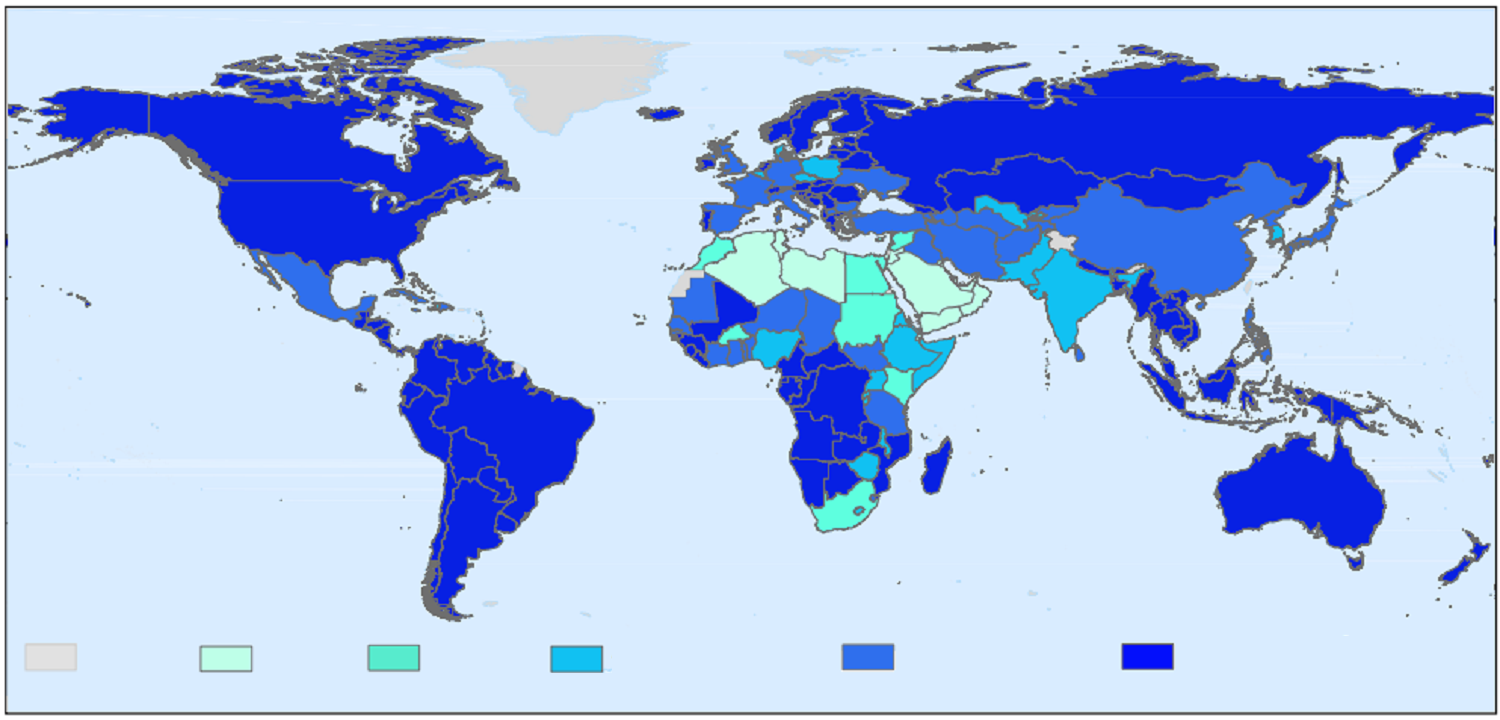
La pression sur les ressources en eau est dramatiquement croissante dans lAlgérie, de climat aride et semi-aride, qui pourrait courir le risque du stress hydrique, voire même de pénurie deau, car ses ressources en eau renouvelables sont inférieures à 500 m3/habitant/an (voir Fig. 1). Cette situation pourrait se dégrader à moyen et long termes, à cause de paramètres multiples : changement climatique, pénurie de pluie, effet de serre, désertification,
Laccès à leau douce sera de plus en plus problématique et son utilisation est répartie entre le secteur agricole, le secteur industriel et le secteur domestique. Ces différentes utilisations quotidiennes produisent une eau usée, chargée en matières nuisibles à la santé humaine (pathogènes) et à lenvironnement (les écosystèmes) et, qui est souvent déversée sans dépollution dans les milieux récepteurs ou utilisée en agriculture. Les eaux usées municipales et industrielles non épurées posent un problème environnemental sérieux : autoépuration inefficace, dégradation de la qualité des eaux douces, détérioration des systèmes écologiques, disparition ou modification génétique des espèces, etc. Il est donc urgent de généraliser le traitement des eaux usées dans des stations dépuration avant de les rejeter, et de retenir ceci comme une approche du développement durable.
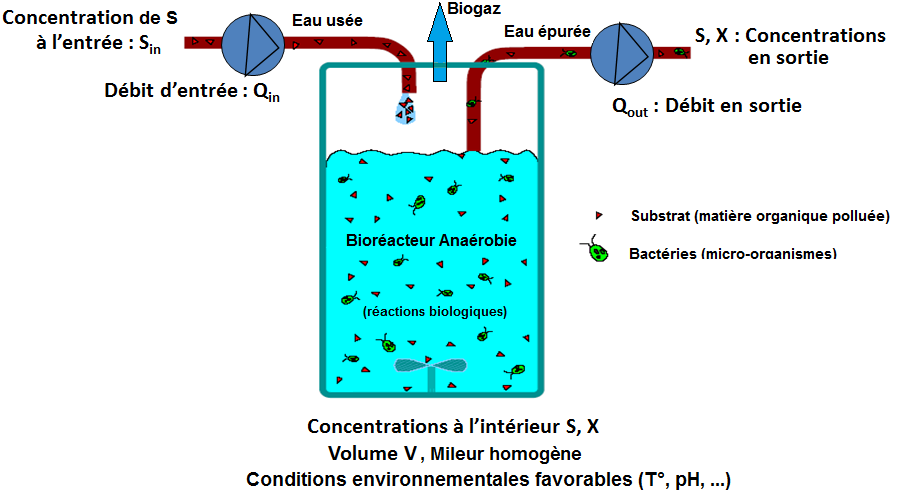
Les procédés classiques de dépollution par voie biologique sont utilisés en grand nombre depuis longtemps et ont montré leur efficacité, notamment pour utilisation locale (urbaine, rurale, fermière, ). Aussi, la gestion de tels systèmes est plus ou moins maîtrisée aujourdhui au niveau des STEP (Station de Traitement et dEpuration des eaux usées). Le principe dun bioprocédé de traitement des eaux usées consiste à utiliser des microorganismes (des bactéries : X) en contact avec la matière organique polluante (substrat : S) afin de la dégrader et ceci, dans des bassins où les conditions environnementales sont maintenues appropriées (Fig. 2).
Deux grands types de bioprocédés sont distingués et peuvent être considérés comme des candidats potentiels pour traiter les eaux usées : les systèmes aérobies fonctionnant en présence doxygène et les systèmes anaérobies, où les microorganismes ne peuvent se développer quen absence doxygène. La technique utilisée dans les systèmes anaérobie sappellera digestion anaérobie ou méthanisation.
Figure 2 : Schéma représentatif dun bioprocédé de dépollution
En plus de ces bioprocédés conventionnels qui ont des limites et des points faibles (coût et qualité des eaux épurées), une des techniques de traitement les plus prometteuses est la technologie des BioRéacteurs Membranaires Anaérobies (BRMAn). Elle permet davoir en sortie des eaux épurées dune qualité meilleure et de produire du biogaz (méthane), qui peut être valorisé sous forme dénergie. Elle pourrait être très rentable pour les agglomérations rurales, les petites et moyennes agglomérations urbaines, les hôpitaux, les petites et moyennes usines, etc.
Malheureusement, la technologie de traitement des eaux usées par voie anaérobie en général et par BRMAn en particulier nest pas encore mise en uvre en Algérie et la population naccepte pas encore sans réserve lidée de la réutilisation des eaux usées traitées particulièrement en agriculture. En plus, les processus anaérobies sont très instables, et les BRMAn ont encore des handicaps (coût et colmatage de la membrane) devant leurs développements, ce qui rend leur gestion délicate, limite encore leur application potentielle à grande échelle et peut même coûter cher sur le plan économique. Cest la raison pour laquelle les outils de modélisation, de contrôle automatique et de supervision sont nécessaires pour optimiser leur fonctionnement. Cest ainsi que lautomatique des bioprocédés est apparue dans les années 80 rendue possible par le développement des capteurs et des systèmes informatiques.
Dans notre équipe, nous nous proposons détudier les problèmes de modélisation, dobservation et de contrôle automatique des bioprocédés de traitement des eaux usées. Nos objectifs généraux sont :
Contribuer à la résolution des problèmes environnementaux causés par la pollution.
Proposer des solutions efficaces et rentables au problème des eaux usées des zones rurales, des fermes et des petites et moyennes entreprises.
Participer au développement durable en traitant les eaux polluées, en produisant de lénergie (biogaz) et en réutilisant les eaux épurées dans les domaines agricole et industriel.
Former des jeunes chercheurs en automatique des bioprocédés et en biotechnologie.
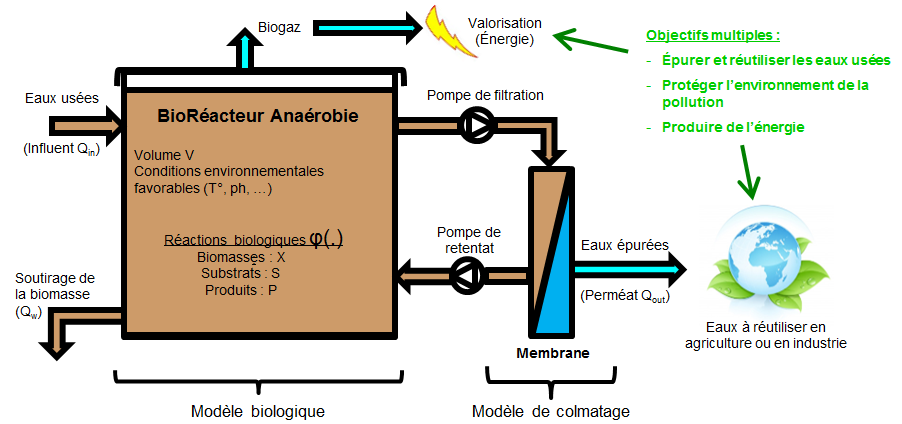
Sur la Fig. 3, nous représentons un schéma technologique des BRMAn auxquels nous nous intéressons. Nous distinguons le compartiment du bassin de rédactions biologiques et celui de la séparation liquide/solide par membrane. Ainsi, les modèles que nous proposons de développer sont des modèles intégrés, cest-à-dire, des modèles biologiques simplifiés décrivant les réactions ayant lieu dans le bioréacteur, couplés à des modèles de colmatage membranaire, car ce dernier phénomène constitue un véritable handicap pour les BRMAn.
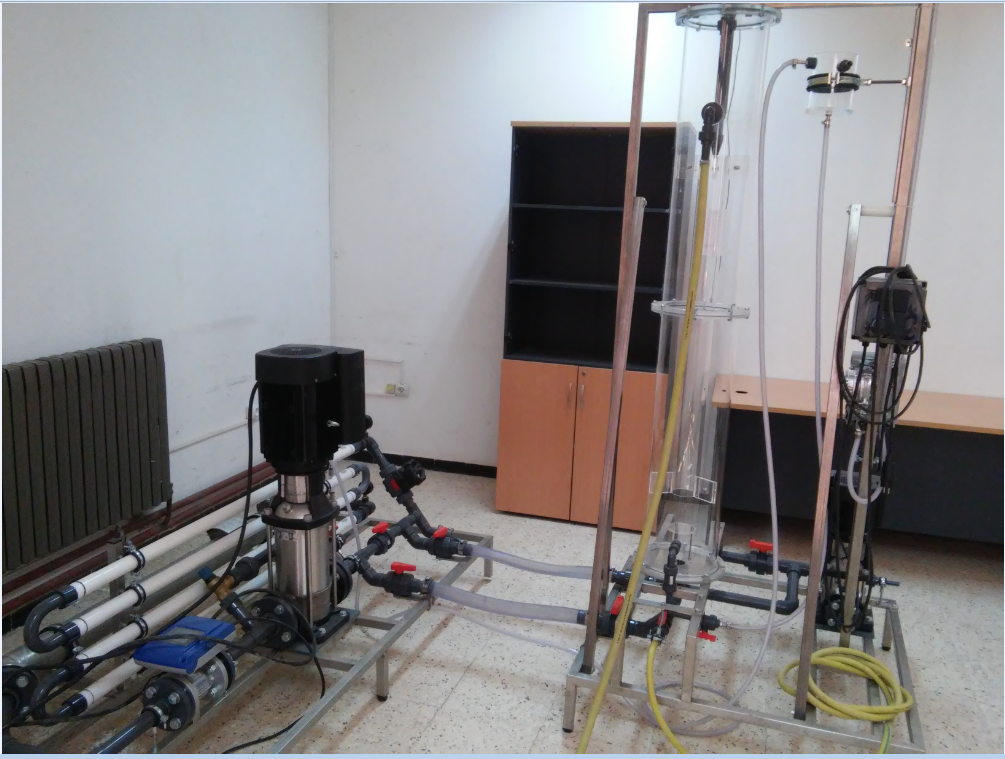
Dans le cadre de lun de ses projets de recherche internationaux, le LAT a acquis un BRM, utilisé comme pilote de laboratoire (photo de la Fig. 4).
Figure 3 : Représentation schématique du BioRéacteur Membranaire Anaérobie à modéliser
Figure 4 : BioRéacteur Membranaire acquis par le Laboratoire dAutomatique de Tlemcen.
Nous représentons sur la Fig. 5 un schéma de principe du contrôle automatique et de lobservation que nous souhaitons réaliser sur le BioRéacteur Membranaire.
Modélisation du processus biologique et analyse mathématique de son comportement dynamique.
Remplacer les capteurs physiques manquants par des capteurs logiciels pour estimer en ligne les concentrations des biomasses, des substrats ou dautres variables
Proposer des lois de commandes robustesvis-à-vis les incertitudes du modèle et, optimales (optimiser certains produits : CH4, H2, .).
Valider les modèles développés, tester les observateurs et les commandes calculés sur un BioRéacteur Membranaireacquis par le laboratoire dAutomatique de Tlemcen(pilote de laboratoire).
Figure 5 : Schéma de principe de la commande et la supervision du processus.
Objectifs de léquipe de recherche en bioprocedes
Objectifs socio-technologiques :
Introduction de la technologie des procédés anaérobie et des BRMAn du traitement des eaux usées dans les petites municipalités ou localités (zones rurales, fermes ), les hôpitaux et les petites et moyennes usines.
Traitement anaérobie des eaux usées à moindre coût et récupération de lénergie (biogaz).
Participation au développement dune culture de la préservation de lenvironnement.
Objectifs scientifiques :
Proposition des modèles de bioprocédés anaérobies et de BRMAn à la fois, simples, capables de reproduire le comportement dynamique du système et adaptés au contrôle et à la supervision.
Proposition de simulateurs et de logiciels de supervision en ligne du processus et synthèse de capteurs logiciels (observateurs)et de lois de commande.
Tests et mise en uvre dune installation de digestion anaérobie (à léchelle-laboratoire sur le BRMAn reçu par le laboratoire dautomatique de Tlemcen et, à léchelle-industrielle).
Approfondir et améliorer davantage les compétences locales du Laboratoire dAutomatique de Tlemcen dans ce domaine de recherche.
Objectifs de formation :
Le projet vise à développer les compétences des jeunes chercheurs (doctorants et masters LMD) en automatique des bioprocédés utilisés pour le traitement des eaux usées, retenu aujourdhui comme une approche du développement durable. Des thèses de doctorat seront impliquées et des stages de master seront encadrés au cours et à la suite du projet.
[Depuis 2006] Le Laboratoire dAutomatique de Tlemcen a participé à plusieurs projets de recherche internationaux sur les bioprocédés de traitement des eaux usées :
[Depuis 2008] Le réseau INRIA Euro-med Treasure (Treatment and Sustainable Reuse of Effluents in semi-arid climates) : un projet euro-méditerranéen de recherche associant des institutions dEurope du sud et dAfrique du nord, 2006-2015, (http://project.inria.fr/treasure). Lobjectif général du réseau est détudier les problèmes liés aux eaux usées et, de leur trouver des solutions efficaces. Ainsi, de développer et concevoir des bioréacteurs membranaires anaérobies pour le traitement de ces eaux usées afin de les réutiliser en agriculture.
[2009-2012] Le projet Co-Advise : projet européen soutenu par le programme IRSES (International Research Staff Exchange Programmes), qui aide à la mobilité des doctorants en codirection. Ce projet a financé 2 thésards du laboratoire.
[2008-2011] Le projet Aires-Sud (Appuis Intégrés pour le Renforcement des Équipes Scientifiques du SUD) : un projet de recherche entre luniversité de Tlemcen, luniversité de Saint-Louis, Sénégal et lIRD (lInstitut de Recherche pour le Développement, France).
Lobjectif était de développer des recherches et des compétences dans le domaine de la modélisation des bioprocédés et, dinstaller et mettre en uvre un bioréacteur membranaire anaérobie acquis par le Laboratoire dAutomatique de Tlemcen dans le cadre de ce projet (voir photo ci-dessus).
2- Commande robuste des systèmes physiques :
Le but du contrôle est de concevoir un système automatique fonctionnant dans lenvironnement réel. La conception de la loi de commande se fait sur la base dun modèle obtenu par identification et après beaucoup de simplifications, parmi lesquelles la négligence de certaines dynamiques, lutilisation des valeurs nominales constantes pour les paramètres du système, la linéarisation autour dun point déquilibre, etc. Par conséquent, la loi de commande calculée sur la base dun modèle simplifié nominal risque de ne pas fonctionner correctement sur le système réel dans lenvironnement réel. Ceci est souvent rencontré dans le domaine du contrôle industriel.
Dans une telle situation, on cherchera à concevoir un système de contrôle qui doit assurer le bon fonctionnement du système pour lensemble de ses modèles, en utilisant les techniques de la commande robuste. Le contrôleur synthétisé doit garder la stabilité du système physique malgré le fait que son modèle change et, assurer ses performances ou les maintenir avec une dégradation faible (robustesse en stabilité et en performances).
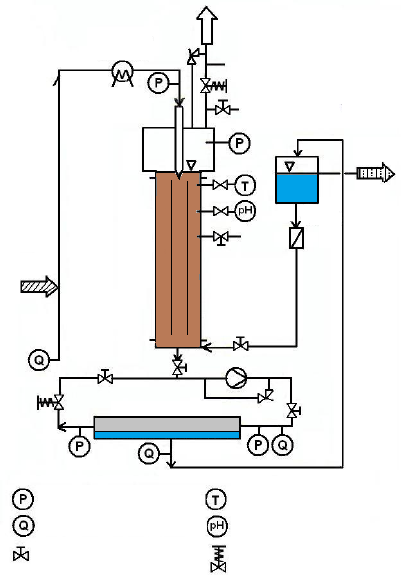
Dans le cadre de cette problématique, deux magisters ont été réalisés en 2005 et 2007 sur la commande robuste par les techniques H8-loopshaping et H8-LMI. Les lois de commandes calculées ont été appliquées en temps réel sur un banc semi-industriel de multi-régulation (régulation de température, pression, débit, niveau, température/débit, pression/débit, )
Figure 1 :Banc de régulation multi-variable (Laboratoire dAutomatique de Tlemcen)
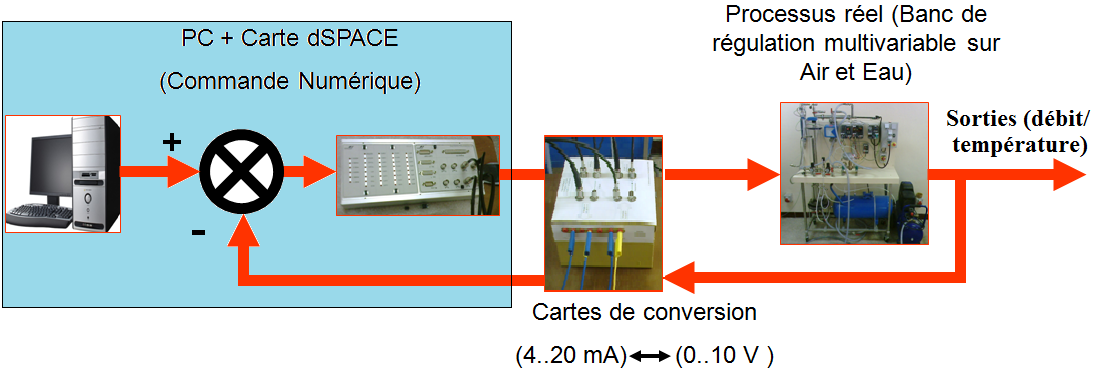
Les lois de commande robustes ont été implantées sur la carte dSPACE 1102 disponible au niveau du laboratoire dAutomatique de Tlemcen (voir la photo de la carte) (dautres cartes existent aussi 1103 et 1104).
Pour assurer la connexion entre le banc de régulation et la carte dSPACE, des filtres passe-bas et des cartes de conversions courant (4-20mA) ?? Tension (0-10V) ont été réalisées. En fait, les signaux délivrés par les capteurs et envoyés aux actionneurs sont entre 4 et 20 mA, tandis que la carte ds1102 reçoit et délivre des tensions entre -10 et +10V. Donc il nous fallait cette conversion dinformations pour assurer le dialogue entre la carte et le banc (voir la photo de la boite de conversion tension/courant).
Figure 2 : panneau d'extension de la carte dSpace 1102 (gauche), conversion 4-20mA??0-10V (droite)
Nous avons choisi de travailler sur le système multivariable température/débit. Le but consistait à :
trouver le modèle du système par des méthodes didentification classiques et modernes,
tester des lois de commandes PID,
synthétiser des lois de commandes robustes H8-loopshaping et H8-LMI et comparer les résultats obtenus.
Figure 3 : Schéma de la boucle de commande
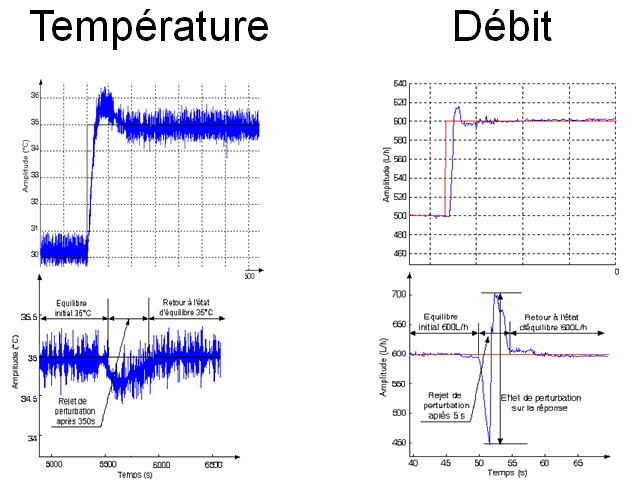
Quelques résultats expérimentaux sont présentés sur la Fig. 4.
Les réponses temporelles de température et de débit sont stables, satisfaisantes et on a une rejection des perturbations appliquées sur la température à linstant 5500 sec et sur le débit à linstant 50 sec.
Figure 4 : Réponses temporelles avec perturbations de la température et du débit
Actuellement, nous avons en projet dappliquer la commande sans modèle sur le banc de régulation. Un sujet de master ou de doctorat sera proposé dans le futur sur ce thème.